Trashformer
Ergebnis des Semesterprojektes im dritten Semester des Studiengangs Mechatronik & Robotik an der FH Technikum Wien.
AUFGABENSTELLUNG:
Es galt einen Transformerbot zu entwickeln, welcher sein Erscheinungsbild ändern kann, über eine automatisierte Fortbewegungsart verfügt und eine zweite Tätigkeit, mit einer anderen Aufgabe als der Fortbewegung, ausführen kann. Der Prototyp sollte dabei ein Budget von 35€ nicht überschreiten.
UMSETZUNG:
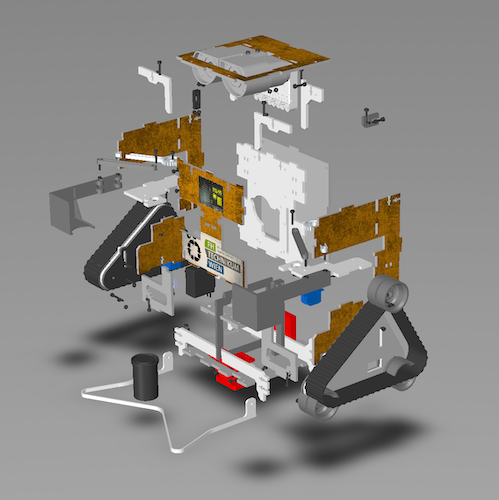
Optisch an den Pixar-Helden „Wall-E“ angelehnt, wurde ein mobiler Roboter entwickelt. Die Fortbewegungsart wurde mit einem Differentialantrieb und Raupenketten umgesetzt und ein Linienverfolger programmiert. Die notwendige Sensorik dafür (zwei Infrarotsensoren) wurde aus Kostengründen selbst erstellt. Die Transformation wurde durch Heben und Senken des zentralen Körperelements umgesetzt, wodurch der Roboter in eine sitzende Position übergeführt wird und der Kopf zum Vorschein kommt. Die zweite geforderte Tätigkeit ist ein Greifmechanismus, welcher durch einen Ultraschallsensor ausgelöst wird. Wenn auf der vorgegebenen Linie eine Filmdose erkannt wird, stoppt Wall-E, kniet nieder und nimmt diese Filmdose auf. Anschließend wird die Filmdose abtransportiert, abgesetzt und die Suche nach weiteren Filmdosen fortgesetzt.
Um die Kosten des Prototypen möglichst gering zu halten, wurde versucht möglichst viel der Elektronik selbst herzustellen und die mechanischen und strukturellen Teile aus Holz mit dem Lasercutter beziehungsweise mittels 3D-Druck gefertigt.