ARNO²
“Harder, Better, Faster, Stronger”. Loosely based on Daft Punk, the goal of a semester project in the master’s program Mechatronics & Robotics at the FH Technikum Wien, ARNO, was to improve a robot in deskop format (LINK) Specifically, the mechanics were to be revised, the control system was to be raised to industrial level and an AR experience was to be developed with Vuforia Studio.
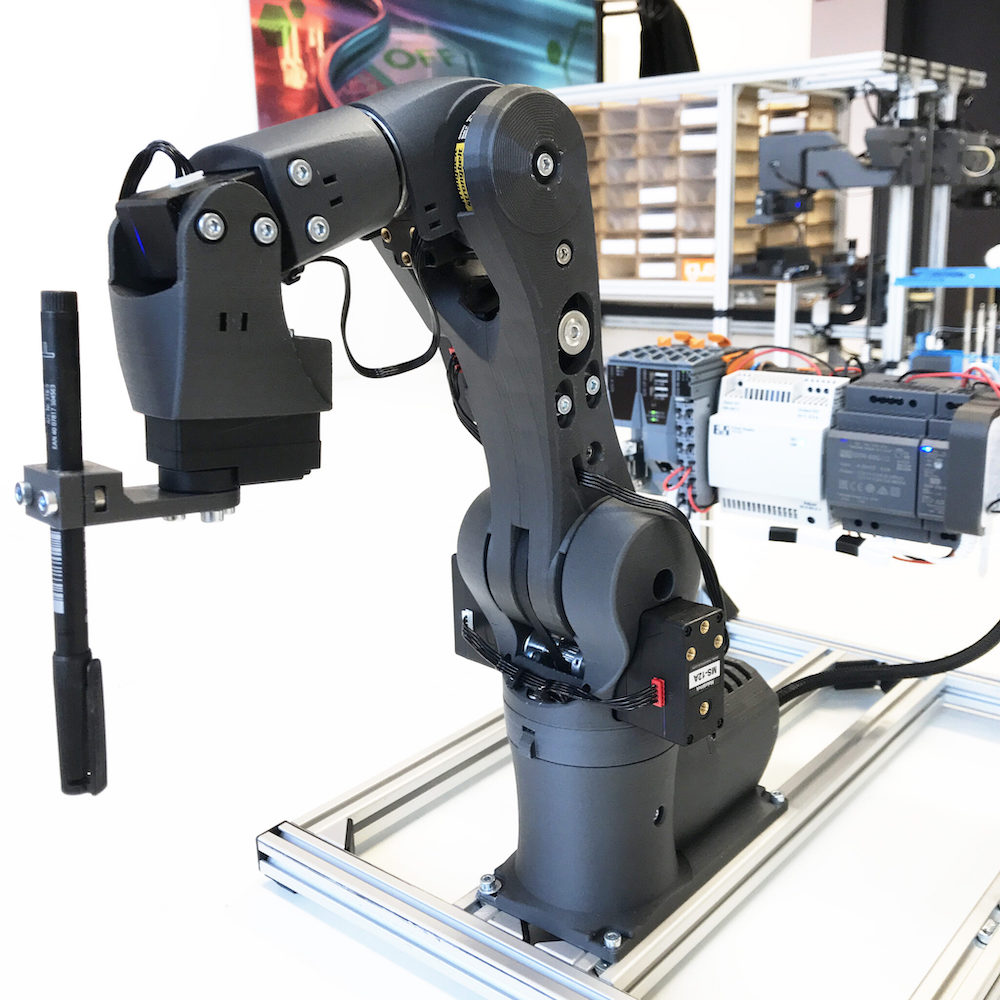
MECHANICAL REENGINEERING
With the goal of enabling higher precision and more payload with the same actuators and size, the design challenge was to incorporate gear stages for the robot’s first three axes into the existing geometry. To do this, the model would be completely rebuilt in Autodesk Fusion 360 and the desired gear ratio would be achieved through the use of V-belts.
As with the previous model, a self-imposed goal was to create the design in such a way that the robot would require as little support structure as possible during manufacturing with FFF 3D printing, thus enabling a consistently beautiful surface on the finished prototype.

INDUSTRIAL CONTROL
In order to be able to start further student projects with ARNO² on industrial level in the future, at least for the controller, a B&R PLC (B&R X20CP0484) was selected and extended with a serial interface module (B&R X20IF1030). Criteria for the selection of the controller were the possibility to calculate inverse kinematics with ready-made package of the controller, a serial interface for communication with the servos and an OPC UA server on the controller.
For the use of the Makeblock MS-12A smart servos, the library of the servos, which was actually created for use with Arduino, was rewritten and adapted for use in the PLC. Using the serial port and a MAX485 RS485 to UART module, the connection between the PLC and the actuators could be established.

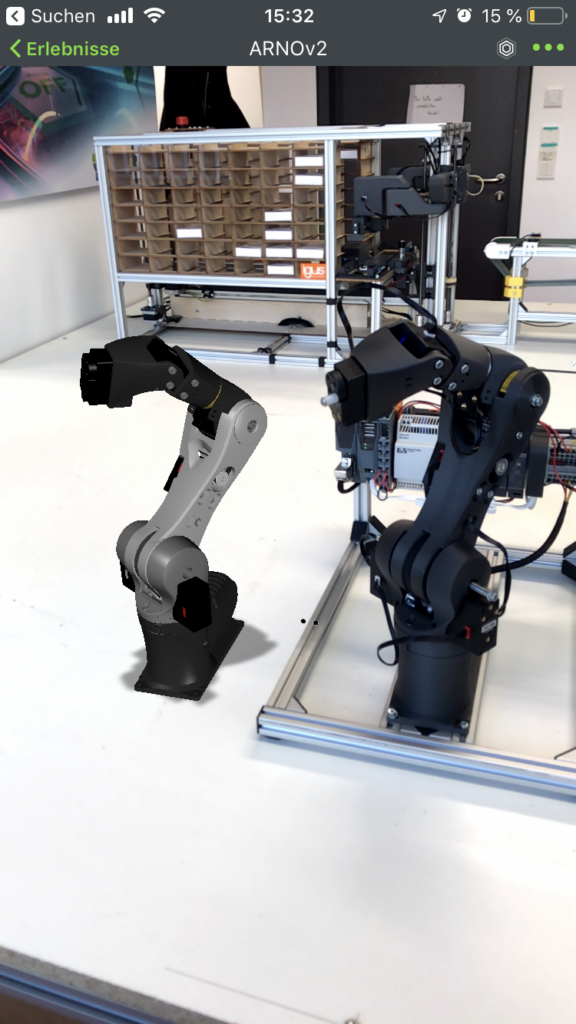
AUGMENTED REALITY EXPERIENCE
For basic control and display of current process data from the robot, an augmented reality experience was developed with PTC Vuforia Studio. This enables operation of the robot on mobile devices.
The data is transferred from the robot via OPC-UA to a local KepserverEx. From there, it is transferred to a ThingWorx server, which in turn represents the IIoT interface to the application on the mobile device.
By tapping on the individual axes of the robot, they can be selected and then moved to the desired position using a slider. A digital twin shows the current position of the robot as well as a planned new position. Other current data is also displayed on a dashboard in the AR.

RESPONSE
As a research partner of the FH Technikum, PTC became aware of the project. As an effective showcase for the application of PTC Vuforia Studio in robotics, there was a short article about the project in the “PTC education” newsletter.

ACKNOWLEDGEMENTS
Last but not least, the FH Technikum Wien should not be left unmentioned in a project like this. They provided the necessary resources and thus laid the foundation for the project. First and foremost Horst Orsolits, who was the guiding hand in the project as a supervisor, but still left enough freedom to allow room for his own ideas.
GALLERY





