ARNO²
„Harder, Better, Faster, Stronger“. Frei nach Daft Punk galt es im Rahmen eines Semesterprojekts im Masterstudium Mechatronik & Robotik an der FH Technikum Wien, ARNO, einen Roboter im Deskopformat (LINK) zu verbessern. Konkret sollte die Mechanik überarbeitet, die Steuerung auf Industrieniveau gehoben und eine AR-Experience mit Vuforia Studio entwickelt werden.
MECHANISCHE ÜBERARBEITUNG
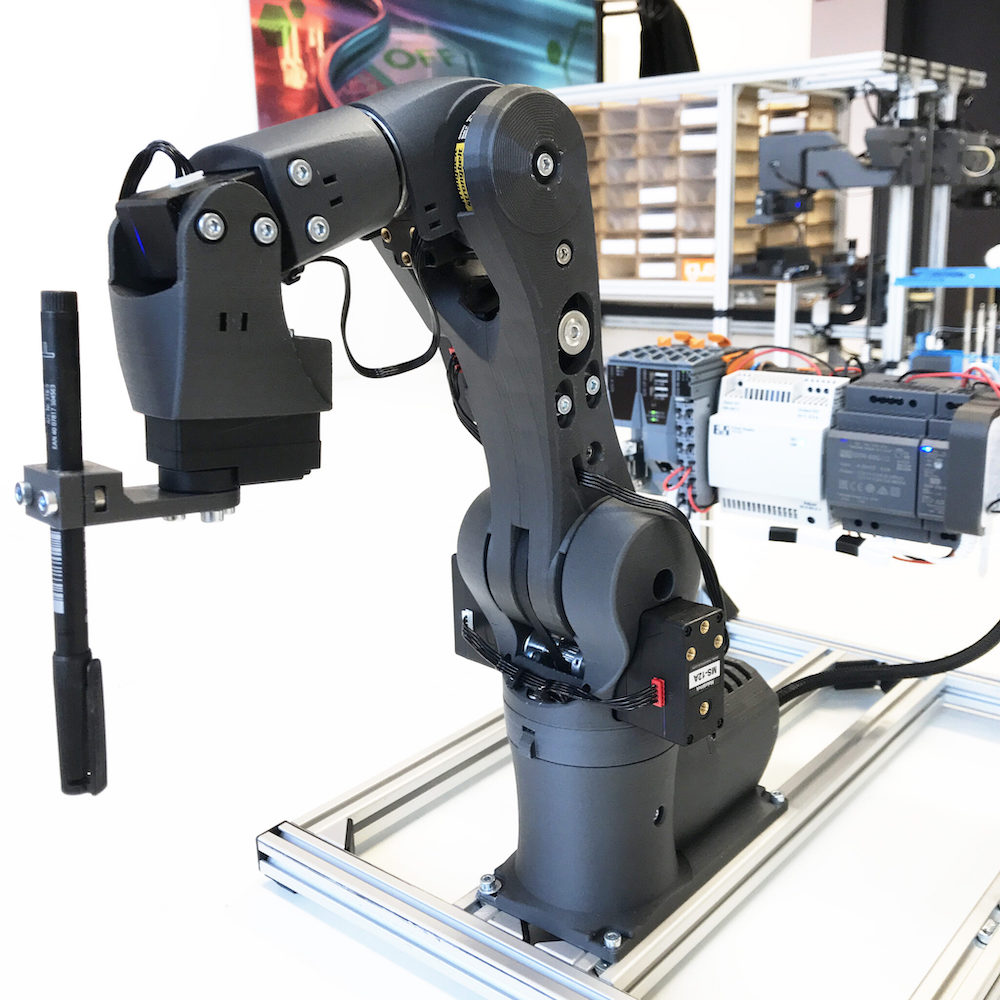
Mit dem Ziel bei gleicher Aktorik und gleicher Baugröße eine höhere Präzision und mehr Payload zu ermöglichen, lag die Herausforderung in der Konstruktion darin, Getriebestufen für die ersten drei Achsen des Roboters in die bestehende Geometrie einzuarbeiten. Dafür würde das Modell in Autodesk Fusion 360 komplett neu aufgebaut und die gewünschte Übersetzung durch den Einsatz von Keilriemen realisiert.
Wie schon beim Vorgängermodell war es ein selbstgesetztes Ziel, das Design so zu gestalten, dass der Roboter beim Fertigen mit FFF-3D-Druck möglichst ohne Stützstruktur auskommt und damit eine durchgehend schöne Oberfläche am fertigen Prototypen ermöglicht wird.

INDUSTRIESTEUERUNG
Damit weitere Studierendenprojekte in Zukunft mit ARNO² auf Industrielevel, zumindest bei der Steuerung, ansetzen können wurde eine B&R-SPS (B&R X20CP0484) ausgewählt und mit einem seriellen Schnittstellenmodul (B&R X20IF1030) erweitert. Kriterien bei der Auswahl der Steuerung war die Möglichkeit inverser Kinematik mit fertigem Paket der Steuerung zu berechnen, eine serielle Schnittstelle für die Kommunikation mit den Servos und ein OPC-UA-Server auf der Steuerung.
Für die Verwendung der Makeblock MS-12A Smart-Servos wurde die Bibliothek der Servos, die eigentlich für die Verwendung mit Arduino erstellt wurde, neu geschrieben und für den Einsatz in der SPS adaptiert. Mit der Seriellen Schnittstelle und einem MAX485 RS485 auf UART-Modul konnte die Verbindung zwischen SPS und den Aktoren hergestellt werden.

AUGMENTED REALITY EXPERIENCE
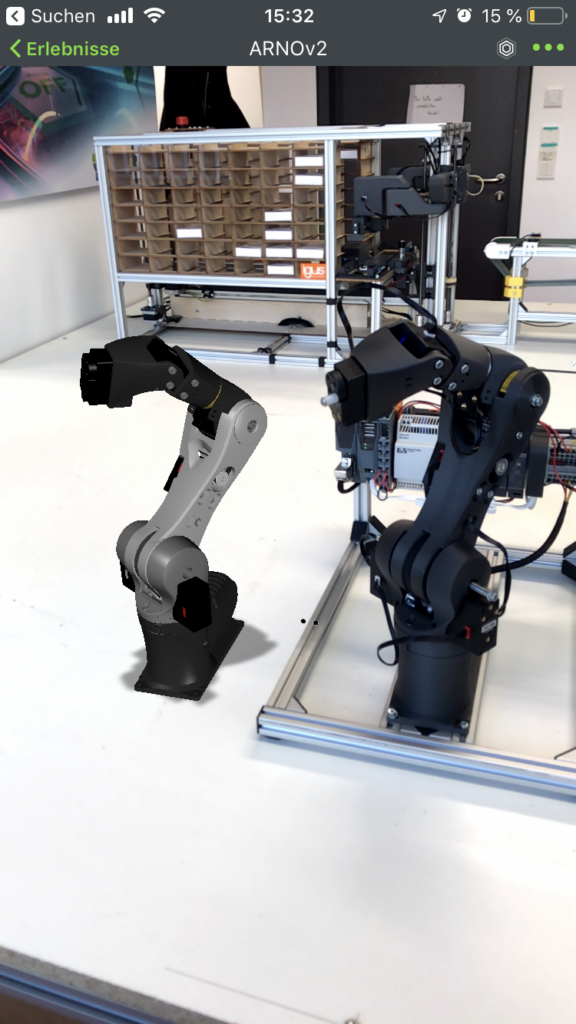
Für grundlegende Steuerung und das Darstellen von aktuellen Prozessdaten vom Roboter wurde mit PTC Vuforia Studio eine Augmented Reality Experience entwickelt. Dieser ermöglicht die Bedienung des Roboters auf mobilen Geräten.
Die Daten werden dafür vom Roboter über OPC-UA an einen lokalen KepserverEx übertragen. Von dort weiter zu einem ThingWorx-Server, der wiederum die IIoT Schnittstelle zu der Applikation auf dem Engerät darstellt.
Durch Tippen auf die einzelnen Achsen des Roboters können diese ausgewählt und im Anschluss per Slider in die gewünschte Position gebracht werden. Ein digitaler Zwilling zeigt die aktuelle Stellung des Roboters sowie eine geplante neue Position. Weiter aktuelle Daten werden zusätzlich auf einem Dashboard in der AR aufbereitet.

REAKTIONEN
Als Forschungspartner der FH Technikum wurde PTC auf das Projekt aufmerksam. Als wirkungsvoller showcase für die Anwendung von PTC Vuforia Studio in der Robotik gab es einen kurzen Beitrag über das Projekt im „PTC education“ Newsletter.

DANKSAGUNG
Zu guter Letzt soll bei einem Projekt wie diesem natürlich auch die FH Technikum Wien nicht unerwähnt bleiben. Diese hat die notwendigen Ressourcen zur Verfügung gestellt und damit erst den Grundstein für das Projekt gelegt. Allen voran Horst Orsolits, der bei dem Projekt als Betreuer die führende Hand war, aber dennoch genug Freiheiten gelassen hat, um auch Raum für eigene Ideen zu ermöglichen.
GALERIE





