
ARNO
Als Showcase für die Anwendung von Augmented Reality in der Robotik entstand im Rahmen der Bachelorarbeiten von meinem Kollegen Tobias Glaser und mir ARNO (Augmented Reality Robot One). ARNO ist ein kleiner Desktoproboter, dessen Design und Kinematik an den KUKA Agilus KR10 angelehnt ist. Ziel der Arbeiten war die Entwicklung eines Roboters im Desktopformat, der alle aktuellen Prozessdaten an eine Augmented Reality-Applikation sendet und dort Visualisierungen, Simulationen und die Steuerung des Roboters über mobile Geräte ermöglicht.
Sowohl die Entwicklung des Roboters selbst, als auch der AR-App wurden zur Gänze im Rahmen der Bachelorarbeiten realisiert. Die Aufgaben wurden so unterteilt, dass der Teil des Roboters inklusive Hard- und Softwareentwicklung von mir und die Entwicklung der Schnittstelle und der AR-App von meinem Kollegen Tobias Glaser erledigt wurde.
HARDWARE
Aktorik:
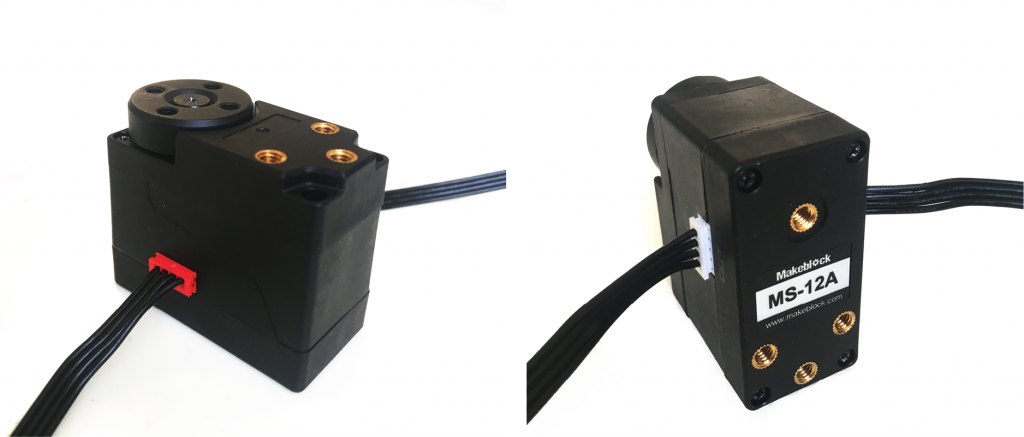
Als Herzstück der Hardware kann man in diesem Zusammenhang die verwendeten Smart Servos MS12-A der Firma Makeblock betrachten. Diese werden von einem Mikrocontroller über UART angesprochen und können Feedback zu Temperatur, Strom, Spannung, Winkel und Geschwindigkeit geben.
Konstruktion und Fertigung:
Der Grundaufbau des Roboters wurde in Autodesk Fusion 360 gezeichnet und mit 3D-Drucker gefertigt. Bei der Konstruktion wurde im speziellen auf ein sauberes Finish der Bauteile geachtet und die Konstruktion so gestaltet, dass Stützstrukturen zum größten Teil vermieden werden konnten, oder nur an Stellen auftreten, die später von anderen Teilen verdeckt wurden.

Steuerung:
Die Hauptsteuerung für ARNO läuft auf einem Raspberry Pi 3B mit Ubuntu Mate. Hier wurden in ROS die einzelnen nodes geschrieben und die Verbindung zum mobilen Gerät realisiert. Zur Kommunikation mit den Servos wurde zusätzlich noch ein Makeblock MegaPi Pro verwendet, der als Interface zu den Smart Servos dient.

FUNKTIONEN
Direct Feedback am Digital Twin:
Zum Verringern des kognitiven Aufwandes bei der Bedienung können bei ARNO die aktuellen Prozessdaten an einem digital Twin visualisiert werden. Das ermöglicht schnell und klar ein Bild vom aktuellen Zustand zu bekommen.

rechts: Einfärbung der Achsen je nach Stromaufnahme und dem damit verbundenen Moment in den einzelnen Achsen.
Joint Contol:
Simple Ansteuerung der einzelnen Achsen über Schieberegler in der AR-App.
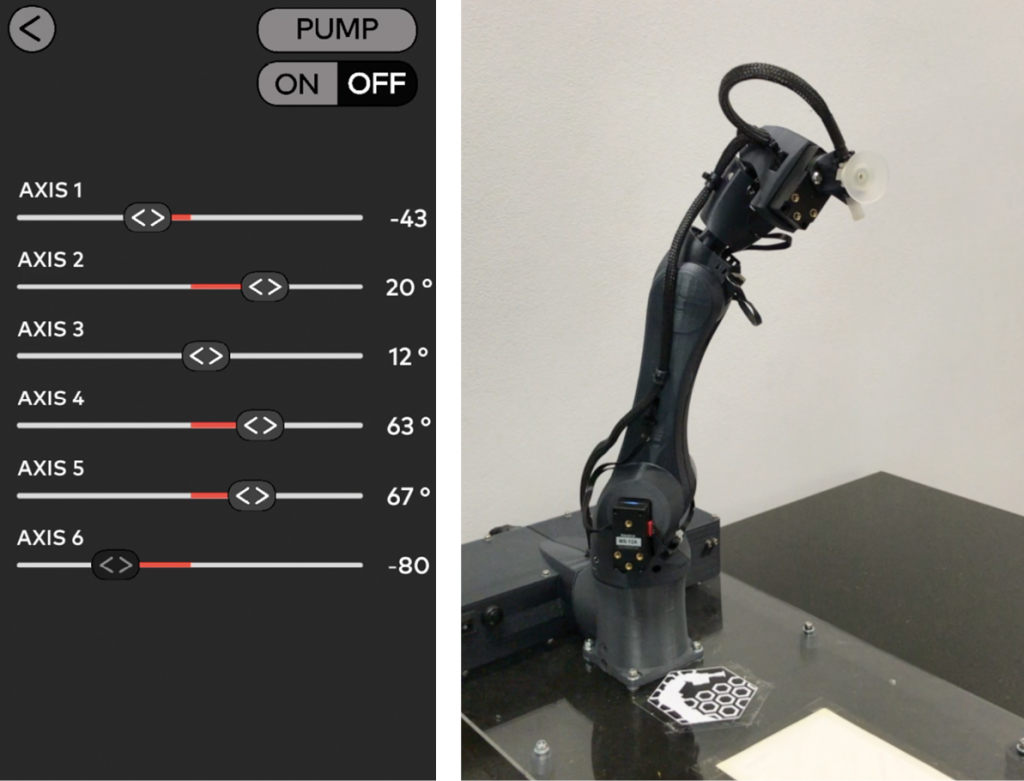
rechts: Roboter in aktueller Pose.
Direct Teach:
Um eine möglichst intuitive Bedienung des Roboters zu ermöglichen, wurde Direct Teach implementiert. Hier wird der Roboter per Hand in verschiedene gewünschte Positionen gebracht und diese abgespeichert. Bevor der somit trainierte Bewegungsablauf jederzeit selbstständig wiederholt wird, kann dieser noch in der Augmented Reality simuliert werden. Hierfür wird ein Geist-Abbild des Roboters direkt über das reale Modell gelegt und simuliert damit im tatsächlichen Umfeld die neuen Bewegungen. Dadurch kann einfach überprüft werden, ob der Roboter beim Ausführen der Bewegung keine Kollisionen mit seiner Umwelt verursacht.
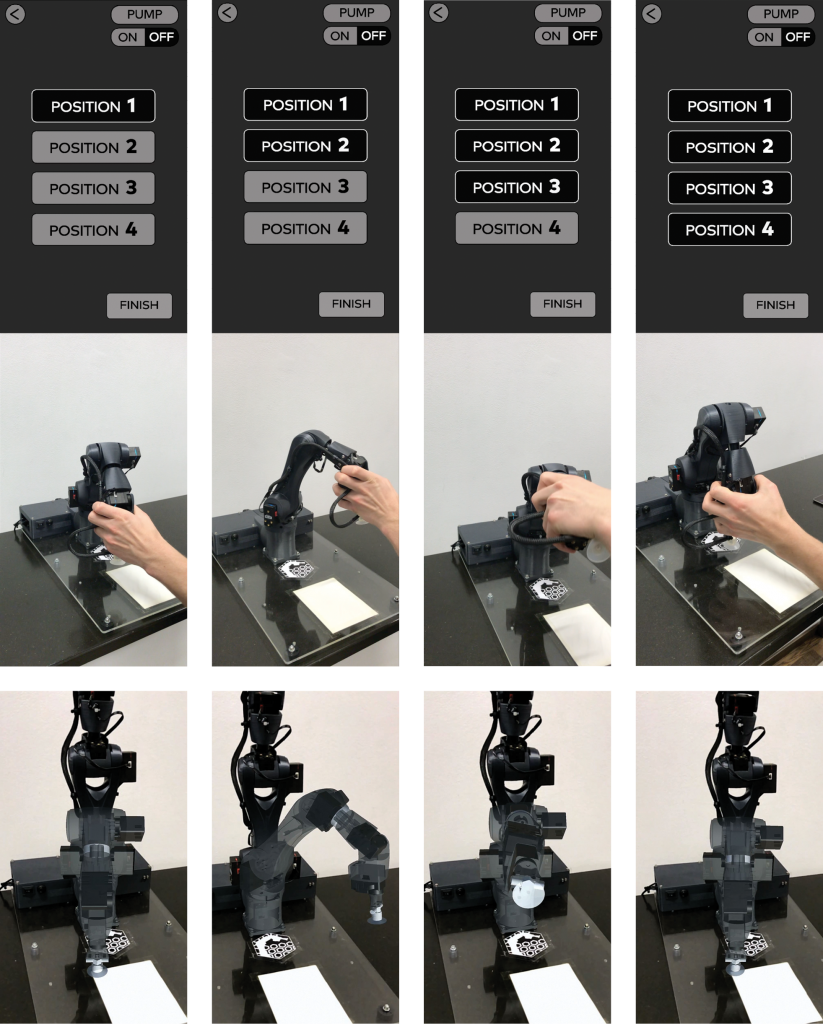
zweite Zeile: Roboter wird per Hand in die gewünsche Position gebracht.
dritte Zeile: Simulation des neuen Bewegungsablaufes in der Augmented Reality.






One Reply to “ARNO”
Comments are closed.